Publications
2026


2025
-
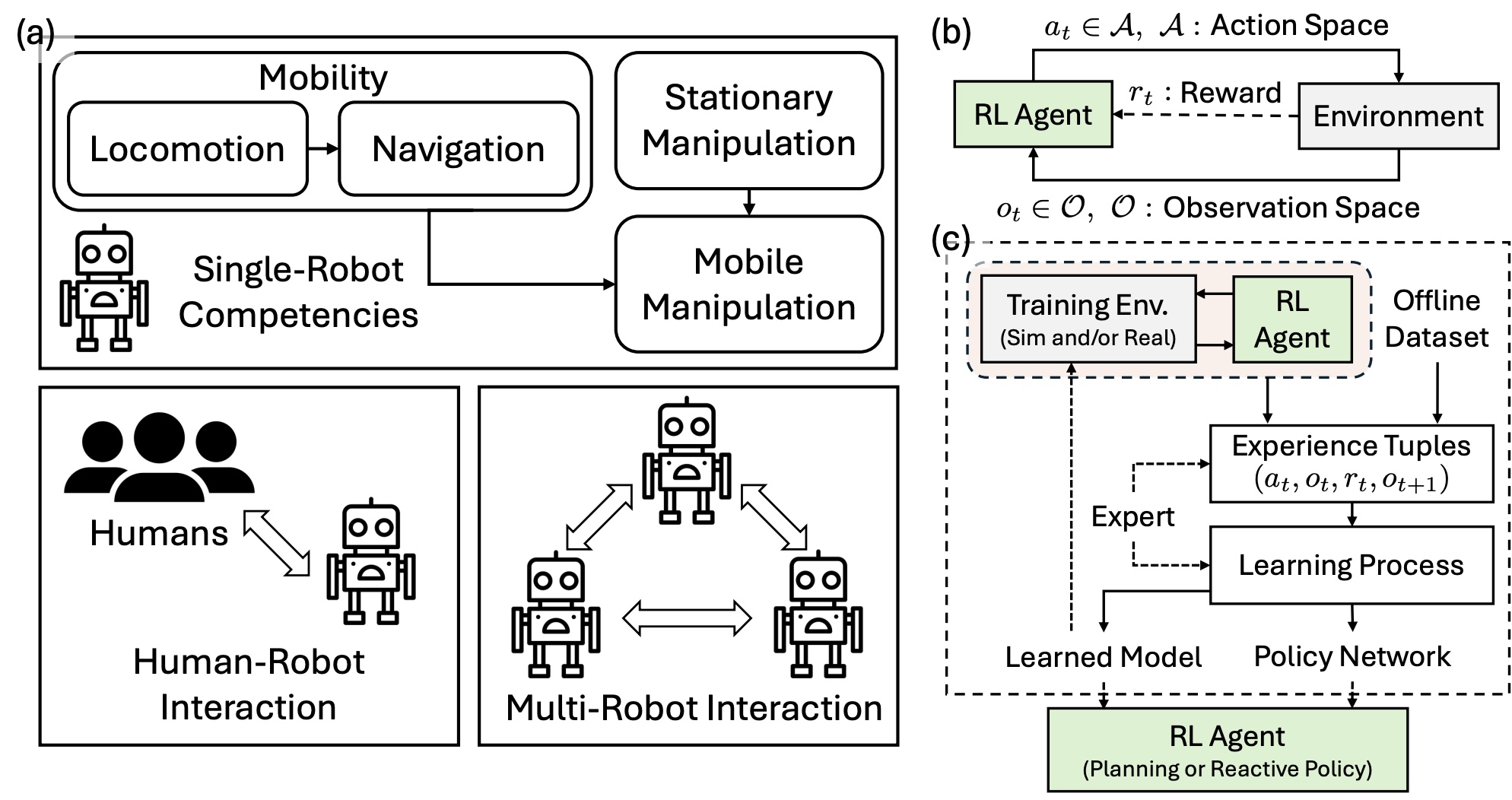 Deep Reinforcement Learning for Robotics: A Survey of Real-World SuccessesIn Annual Review of Control, Robotics, and Autonomous Systems, Volume 8, 2025
Deep Reinforcement Learning for Robotics: A Survey of Real-World SuccessesIn Annual Review of Control, Robotics, and Autonomous Systems, Volume 8, 2025
2024
2023
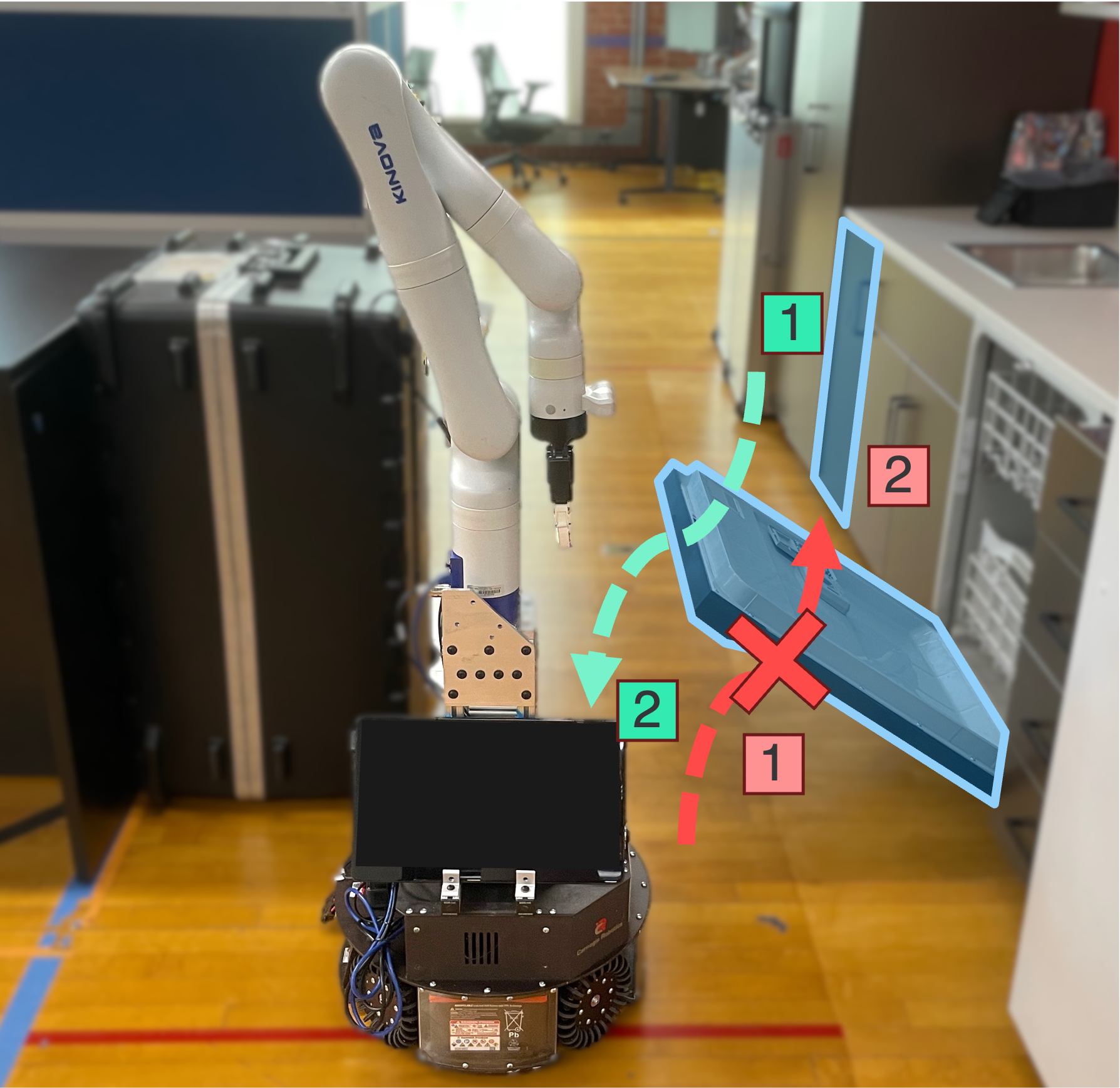
- M-EMBER: Tackling Long-Horizon Mobile Manipulation via Factorized Domain TransferIn International Conference on Robotics and Automation (ICRA), 2023
-
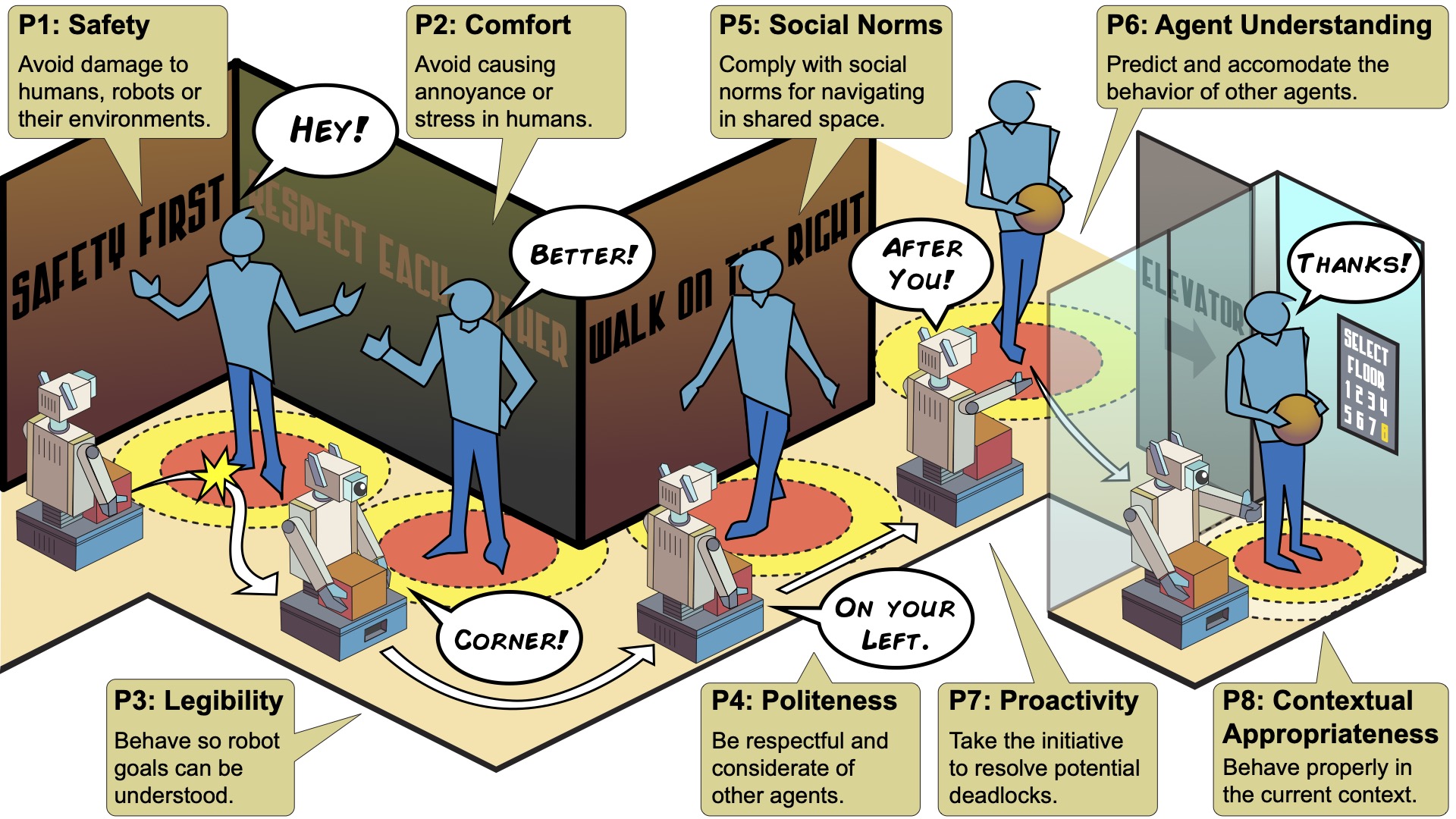 Principles and guidelines for evaluating social robot navigation algorithmsarXiv preprint, 2023
Principles and guidelines for evaluating social robot navigation algorithmsarXiv preprint, 2023 -
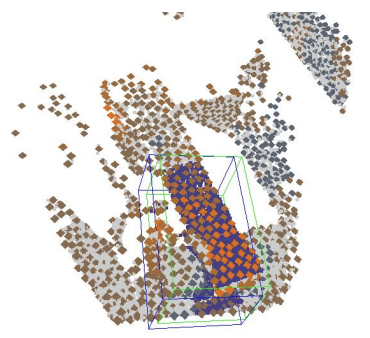 Model-Agnostic Hierarchical Attention for 3D Object DetectionarXiv preprint arXiv:2301.02650, 2023
Model-Agnostic Hierarchical Attention for 3D Object DetectionarXiv preprint arXiv:2301.02650, 2023

2022
- ULIP: Learning Unified Representation of Language, Image and Point Cloud for 3D UnderstandingarXiv preprint arXiv:2212.05171, 2022
- Eye-BEHAVIOR: An Eye-Tracking Dataset for Everyday Household Activities in Virtual, Interactive, and Ecological EnvironmentsJournal of Vision, 2022
- Generating Procedural 3D materials from Images using Neural NetworksIn 2022 4th International Conference on Image, Video and Signal Processing, Jan 2022
- BEHAVIOR in Habitat 2.0: Simulator-Independent Logical Task Description for Benchmarking Embodied AI AgentsarXiv preprint arXiv:2206.06489, Jan 2022

2021
- ReLMoGen: Leveraging motion generation in reinforcement learning for mobile manipulationIn 2021 International Conference on Robotics and Automation (ICRA), Jan 2021
- Robot navigation in constrained pedestrian environments using reinforcement learningIn 2021 IEEE International Conference on Robotics and Automation (ICRA), Jan 2021
- iGibson 1.0, a Simulation Environment for Interactive Tasks in Large Realistic ScenesIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2021
- Deep affordance foresight: Planning through what can be done in the futureIn 2021 IEEE International Conference on Robotics and Automation (ICRA), Jan 2021
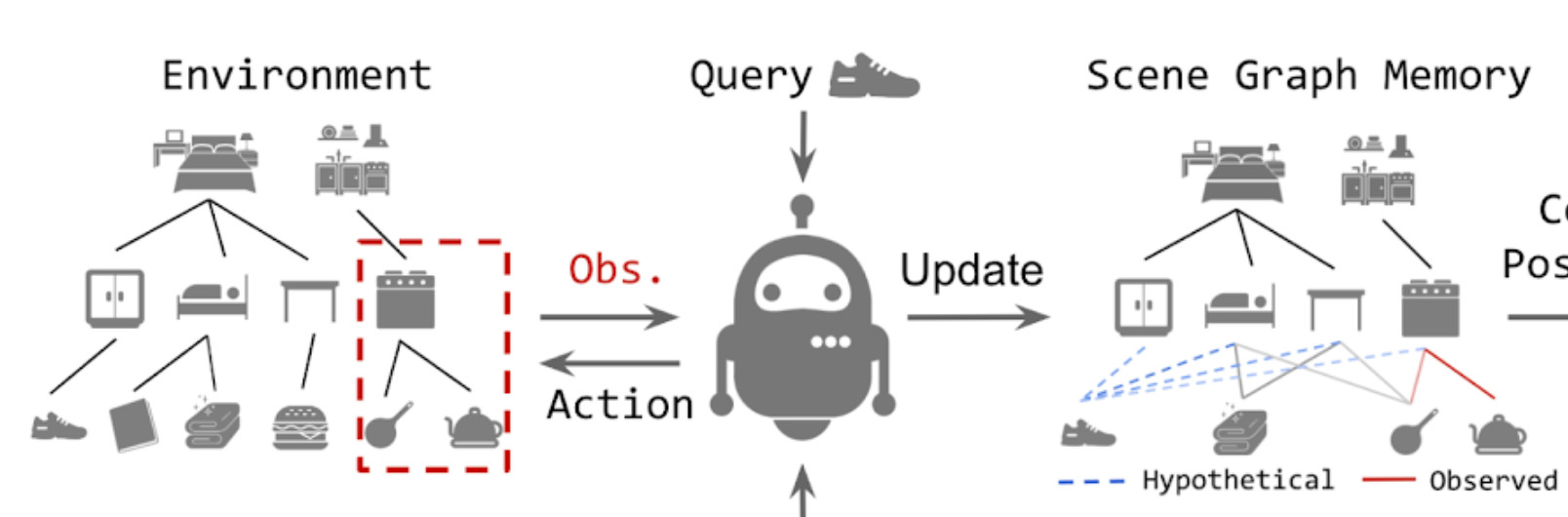
- Semantic and geometric modeling with neural message passing in 3d scene graphs for hierarchical mechanical searchIn 2021 IEEE International Conference on Robotics and Automation (ICRA), Jan 2021
- Learning multi-arm manipulation through collaborative teleoperationIn 2021 IEEE International Conference on Robotics and Automation (ICRA), Jan 2021
- Greedy hierarchical variational autoencoders for large-scale video predictionIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Jan 2021
- Laser: Learning a latent action space for efficient reinforcement learningIn 2021 IEEE International Conference on Robotics and Automation (ICRA), Jan 2021
- Jrdb: A dataset and benchmark of egocentric robot visual perception of humans in built environmentsIEEE transactions on pattern analysis and machine intelligence, Jan 2021
- Differentiable factor graph optimization for learning smoothersIn 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2021
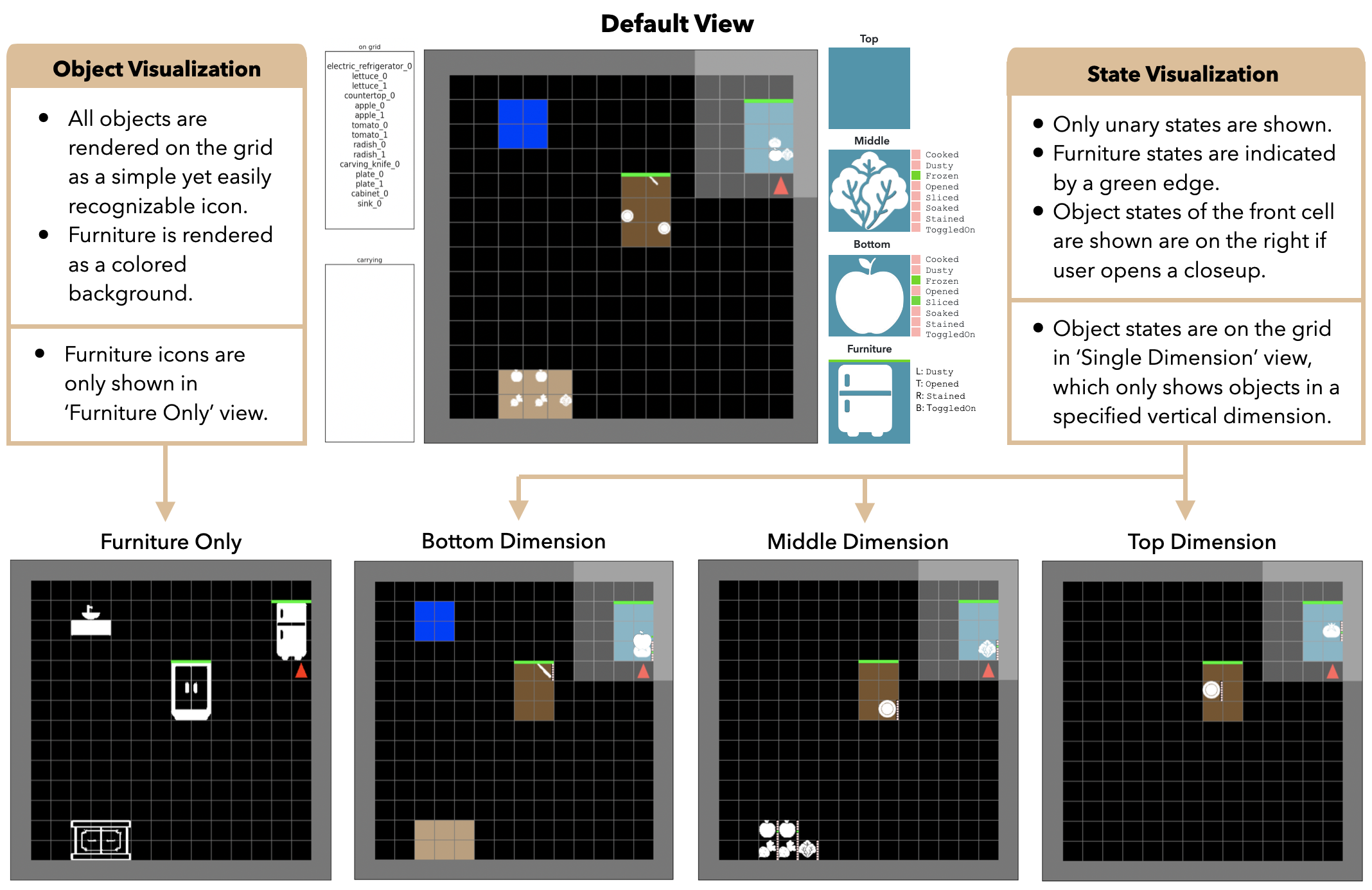
- BEHAVIOR: Benchmark for everyday household activities in virtual, interactive, and ecological environmentsIn 5th Annual Conference on Robot Learning, Jan 2021
-
- iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household TasksIn 5th Annual Conference on Robot Learning, Jan 2021
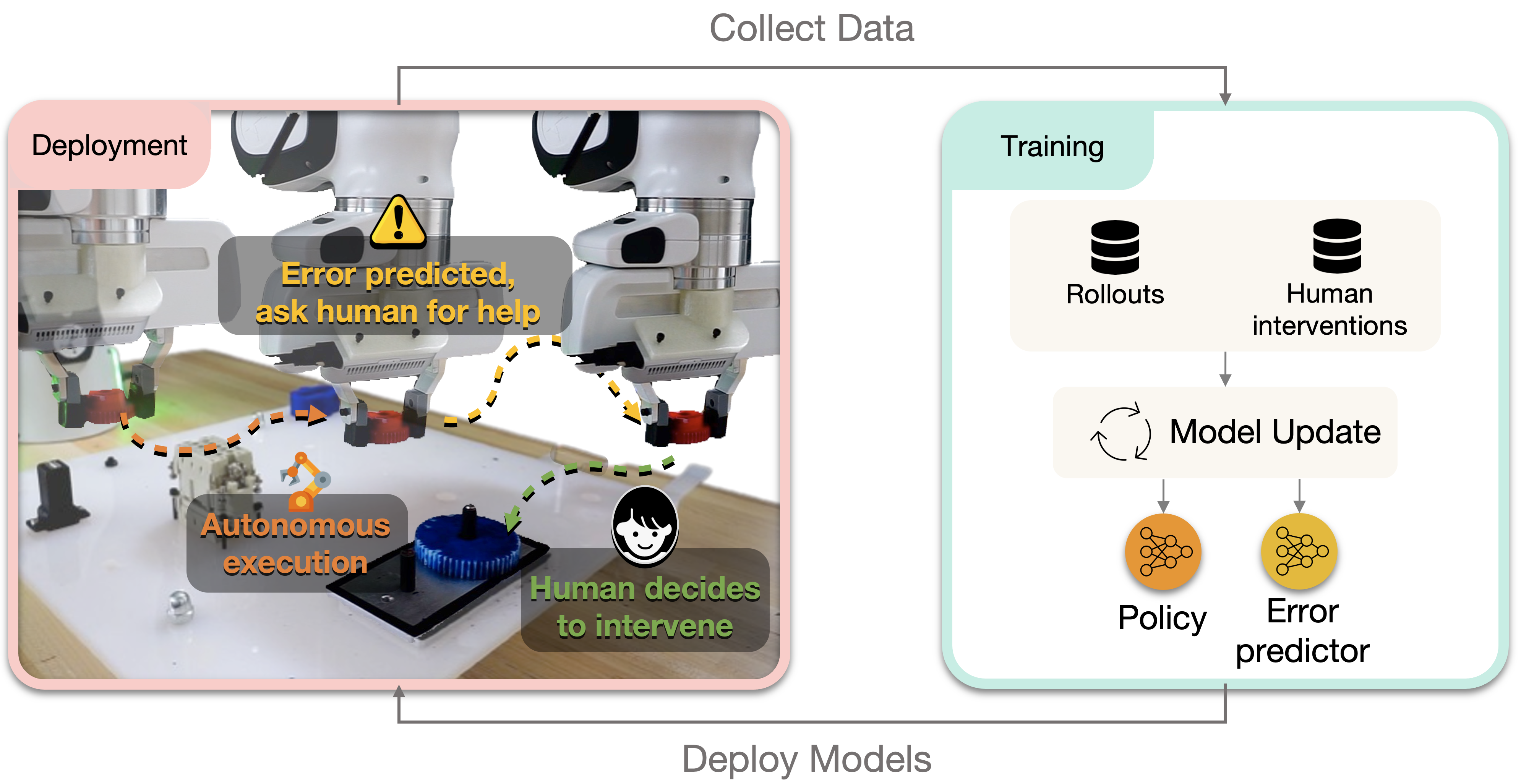
- Error-aware imitation learning from teleoperation data for mobile manipulationIn 5th Annual Conference on Robot Learning, Jan 2021
2020
- 6-pack: Category-level 6d pose tracker with anchor-based keypointsIn 2020 IEEE International Conference on Robotics and Automation (ICRA), Jan 2020
- Hrl4in: Hierarchical reinforcement learning for interactive navigation with mobile manipulatorsIn Conference on Robot Learning, Jan 2020
- Leveraging pretrained image classifiers for language-based segmentationIn Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Jan 2020
- Interactive gibson benchmark: A benchmark for interactive navigation in cluttered environmentsIEEE Robotics and Automation Letters, Jan 2020
- JRMOT: A real-time 3d multi-object tracker and a new large-scale datasetIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2020
- Learning to generalize across long-horizon tasks from human demonstrationsIn Robotics: Science and Systems (RSS), Jan 2020
- Probabilistic Visual Navigation with Bidirectional Image PredictionarXiv preprint arXiv:2003.09224, Jan 2020
- Visuomotor mechanical search: Learning to retrieve target objects in clutterIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2020
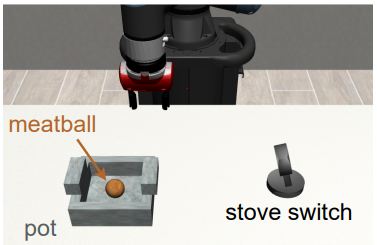
- robosuite: A modular simulation framework and benchmark for robot learningarXiv preprint arXiv:2009.12293, Jan 2020
- Multimodal Sensor Fusion with Differentiable FiltersIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2020
- Human-in-the-loop imitation learning using remote teleoperationarXiv preprint arXiv:2012.06733, Jan 2020
2019
- The RBO dataset of articulated objects and interactionsThe International Journal of Robotics Research, Jan 2019
- Densefusion: 6d object pose estimation by iterative dense fusionIn IEEE/CVF Conference on Computer Vision and Pattern Recognition, Jan 2019
- Mechanical search: Multi-step retrieval of a target object occluded by clutterIn 2019 International Conference on Robotics and Automation (ICRA), Jan 2019
-
- Deep local trajectory replanning and control for robot navigationIn 2019 international conference on robotics and automation (ICRA), Jan 2019
- Coupled recursive estimation for online interactive perception of articulated objectsThe International Journal of Robotics Research, Jan 2019
- Variable impedance control in end-effector space: An action space for reinforcement learning in contact-rich tasksIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2019
- DANTE: deep affinity network for clustering conversational interactantsIn ACM on Human-Computer Interaction (CSCW), Jan 2019
- Ac-teach: A bayesian actor-critic method for policy learning with an ensemble of suboptimal teachersIn Conference on Robot Learning, Jan 2019
-
- Regression planning networksIn Advances in Neural Information Processing Systems 2019 (NeurIPS), Jan 2019
- Vunet: Dynamic scene view synthesis for traversability estimation using an rgb cameraIEEE Robotics and Automation Letters, Jan 2019
- Coupled Recursive Estimation for Online Interactive Perception of Articulated Objects–Online IP DataJan 2019
2018
- Physics-based selection of informative actions for interactive perceptionIn 2018 IEEE International Conference on Robotics and Automation (ICRA), Jan 2018
- Four aspects of building robotic systems: lessons from the Amazon Picking Challenge 2015Autonomous Robots, Jan 2018
- Leveraging problem structure in interactive perception for robot manipulation of constrained mechanismsJan 2018
2017
- Building Kinematic and Dynamic Models of Articulated Objects with Multi-Modal Interactive PerceptionIn AAAI Spring Symposium Series - Interactive Multi-Sensory Object Perception for Embodied Agents, Jan 2017
- Cross-modal interpretation of multi-modal sensor streams in interactive perception based on coupled recursionIn 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2017
- Opening a lockbox through physical explorationIn 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Jan 2017
2016
- An Integrated Approach to Visual Perception of Articulated ObjectsIn International Conference on Robotics and Automation (ICRA), Jan 2016
- Lessons from the Amazon Picking Challenge: Four Aspects of Building Robotic SystemsIn Robotics, Science and Systems (RSS), Jan 2016
- Probabilistic Multi-Class Segmentation for the Amazon Picking ChallengeIn International Conference on Intelligent Robots and Systems (IROS), Jan 2016
- Estimating the relation of perception and action during interactionIn International Workshop on Robotics in the 21st century: Challenges and Promises, Jan 2016
-
2015
2014
- Online interactive perception of articulated objects with multi-level recursive estimation based on task-specific priorsIn IEEE/RSJ International Conference on Intelligent Robots and Systems, Jan 2014
- Deterioration of depth measurements due to interference of multiple RGB-D sensorsIn 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Jan 2014