Overview
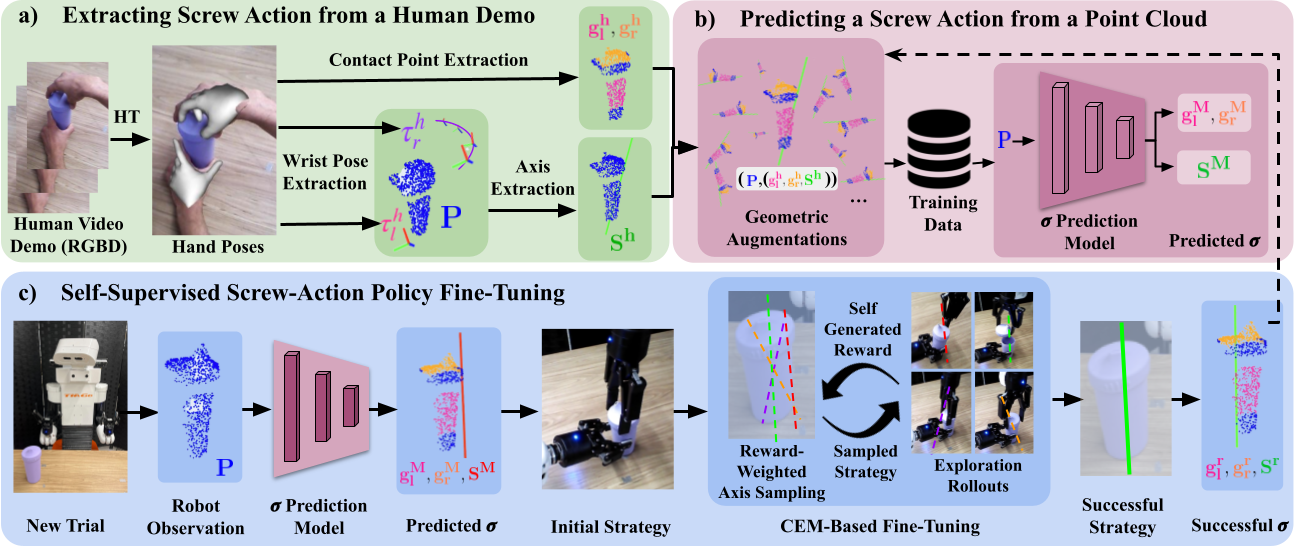
ScrewMimic inputs an RGB-D video of a human performing a bimanual task and uses off-the-shelf hand tracking (HT) models to extract a trajectory of wrist poses (τhl, τhr) and grasp contact points (ghl , ghr ). ScrewMimic interprets τhl and τhr as a screw motion between both hands to estimate screw axis parameters Sh. Next, it applies geometric augmentations on the 3D object point cloud to train a PointNet model to estimate screw actions for novel object views. Finally, the trained model generates an initial hypothesis that the robot executes and iteratively refines using an autonomously generated reward signal. The successful data point is further used to improve the prediction model.