Electronic Instruction
Text Instruction
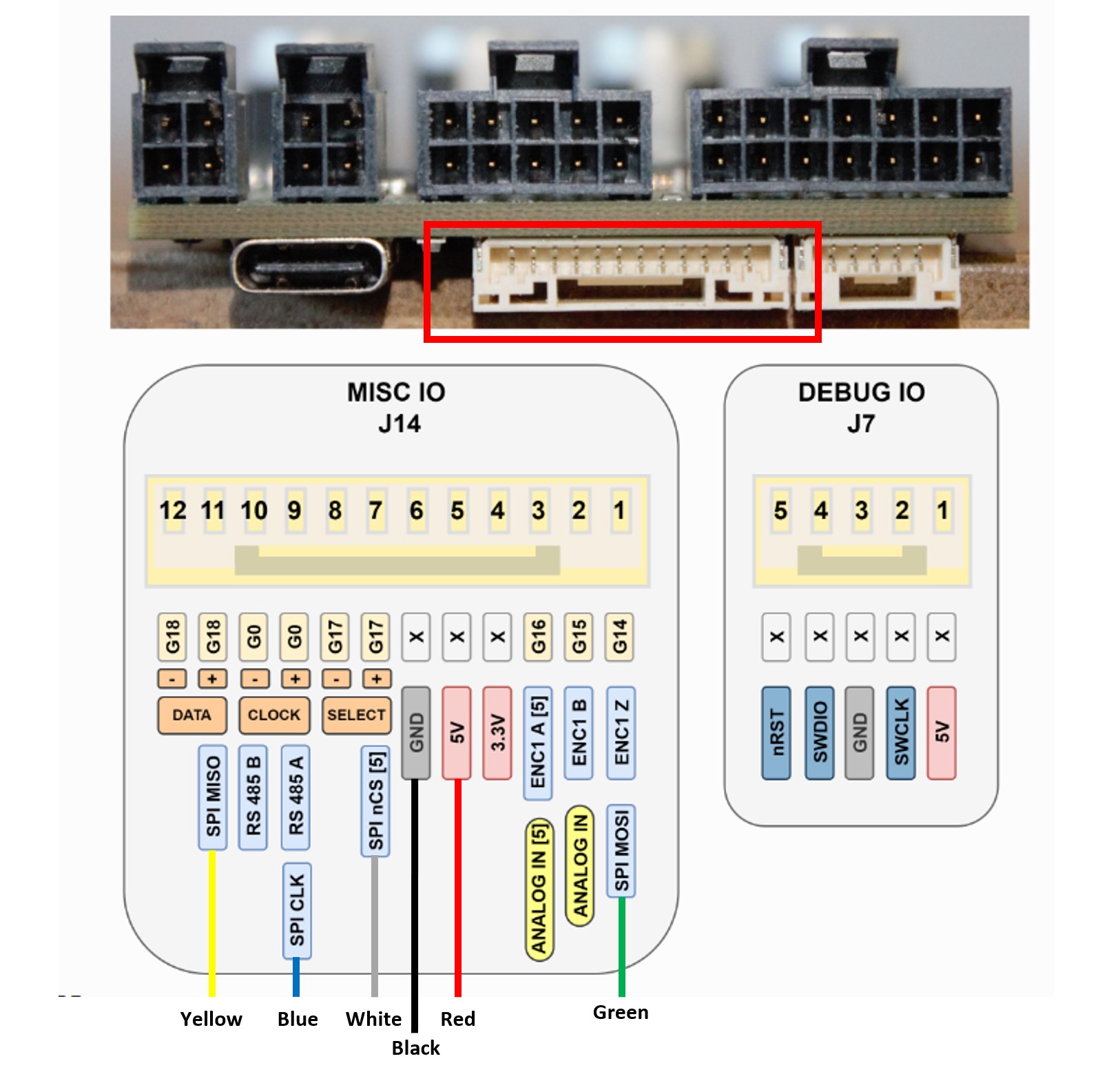
Encoder Wiring Diagram
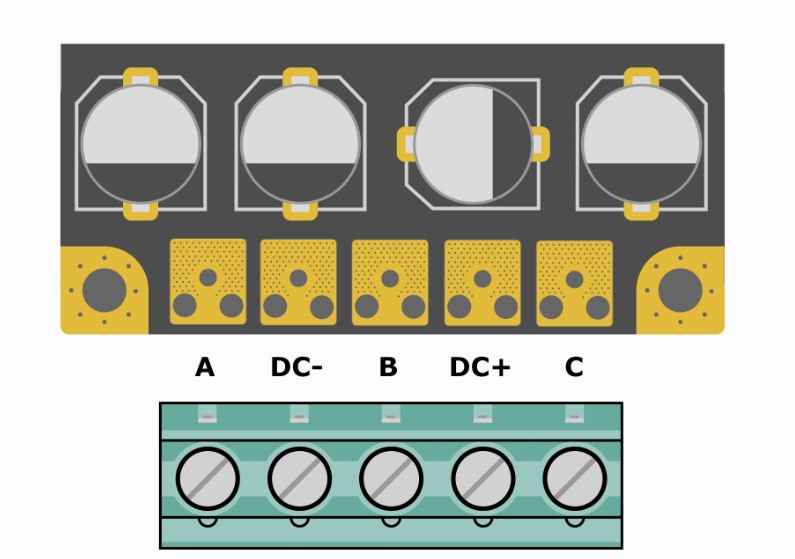
3-Phase Motor and Power Cable Wiring Diagram
Calibration Instruction Video
In "Power Source" page:
DC bus overvoltage: 26
DC bus undervoltage: 26
DC max positive current: 5
DC max nagative current: -5
In "Motor" Setup page:
Type: Gimbal
Phase resistance : 1.2
Pole pairs: 14
KV: 55
Current limit: 3.1
Motor calib. current: 3.1
Motor calib. voltage: 24
Lock-in spin current: 0.1
In "Encoder Paramater" page:
Type: SPI(AMS protocol)
nCS pin: GPIO17
In "Control mode" page
Control mode: Filtered Position Control
Position Setpoint: USB/UART/CAN
Bandwidth: 15
Soft velocity limit: 10
Hard velocity limit: 10
Torque limit: 0.6
1) Click "Erase & Reboot" button in Erease old configuration step
2) Click "Apply new configuration" button in Apply new configuration step
3) Click "Save & Reboot" button in Save to non-volatile memory step
4) Click "Run Calibration Sequence" button in Calibrate step and wait until calibration is done
5) Click "Save & Reboot" button in Save to non-volatile memory step
Change the Position Gain, velocity Gain and velocity Integrator Gain as below.
(This is the empirical value. You can find the better tuning values by modifying those.)
Position Gain: 20
Velocity Gain: 0.3
Velocity Integrator Gain: 0.333