Numerical + Event-Time Info.Cooking Popcorn: HALO adds the right number of scoops, then turns off the stove 4.5 minutes after switching it on
Event-Time Info.Boiling Spaghetti: HALO boils the spaghetti for 8 minutes before turning off the stove
Event-Time Info.Toasting Bread: HALO toasts the bread for 2 minutes before turning off the stove
Relational Info.Return to Same Container: HALO returns the bowl to the original plate
Numerical Info.Store N Objects: HALO stores exactly 2 packets and closes the door
Event-Time Info.Heat Stove for T Minutes: HALO turns off the stove after 30 seconds
Numerical Info. + Human-Robot Collab.Store N Objects: Human places 1 cup; HALO places the remaining 2
Relational Info.Return to Same Container: HALO returns the bowl to the original plate
Numerical Info.Store N Objects: HALO stores exactly 2 packets and closes the door
Event-Time Info.Heat Stove for T Minutes: HALO turns off the stove after 30 seconds
Numerical Info. + Human-Robot Collab.Store N Objects: Human places 1 cup; HALO places the remaining 2
Relational Info.Return to Same Container: HALO returns the bowl to the original plate
Numerical Info.Store N Objects: HALO stores exactly 2 packets and closes the door
Spatial Info.Retrieve Object: HALO retrieves the granola bar from its last seen location
Spatial Info.Retrieve Object: HALO retrieves the granola bar from its last seen location
Spatial Info.Retrieve Object: HALO retrieves the granola bar from its last seen location
Spatial Info.Retrieve Object: HALO retrieves the granola bar from its last seen location
Event-Time Info.Heat Stove for T Minutes: HALO turns off the stove after 1 minute
Numerical Info. + Human-Robot Collab.Store N Objects: Human places 1 cup; HALO places the remaining 2
Relational Info.Return to Same Container: HALO returns the bowl to the original plate after recovering from a failed grasp
Event-Time Info.Heat Stove for T Minutes: HALO turns off the stove after 1 minute
Numerical Info. + Human-Robot Collab.Store N Objects: Human places 1 cup; HALO places the remaining 2
Event-Time Info.Heat Stove for T Minutes: HALO turns off the stove after 90 seconds
Numerical Info. + Human-Robot Collab.Store N Objects: Human places 2 cups; HALO places the remaining 1
Event-Time Info.Heat Stove for T Minutes: HALO turns off the stove after 6 minutes
Numerical Info. + Human-Robot Collab.Store N Objects: Human places 2 cups; HALO places the remaining 1
Event-Time Info.Heat Stove for T Minutes: HALO turns off the stove after 8 minutes
Numerical Info. + Human-Robot Collab.Store N Objects: Human places 2 cups; HALO places the remaining 1
Abstract
HALO is a visuomotor policy for long-horizon robot control that learns to retrieve information
from its past interaction (including past image observations, proprioceptives, and actions)
for predicting the current action.
These past interactions are stored in the long context of a transformer-based policy.
However, long-context policies trained by imitation learning struggle with spurious correlations
from history and compounding prediction errors. HALO addresses these challenges by
distilling VLM priors through video question-answering supervision, reducing spurious correlations,
and applying Top-K sparse attention to reduce the impact of accumulated errors in the context. Notably, HALO outperforms both text-based memory summarization and
hand-engineered feature stores, as retaining raw observations and actions lets the policy exploit
fine-grained details that VLMs discard during summarization and that human designers
overlook when hand-crafting features.
Read full abstract
General-purpose robots operating in partially observable environments, such as homes, require
memory to support autonomy. They must recall diverse information from the past, such as where
objects were placed, which tasks a human partner has completed, and when an appliance was
turned on, to accomplish a wide range of tasks. Achieving this versatility requires a memory
retrieval mechanism that generalizes well across tasks. However, hand-designed or
heuristic-based methods rely on task-specific assumptions that may not transfer to different
settings.
Transformer architectures that use attention over long contexts for memory retrieval provide
a promising alternative, as they learn retrieval from data without task-specific assumptions.
However, directly incorporating long-context transformer architecture into imitation learning
from offline data introduces two key challenges: (1) the policy may learn spurious
correlations between information from the past and predicted actions, and (2) errors
accumulate over time in the memory due to prediction inaccuracies and their compounding
interactions with the environment, leading to model drift and cascading failures in
long-horizon control.
To address both challenges, we introduce HALO, a visuomotor policy with an attention-based
memory retrieval mechanism for long-horizon control. To suppress spurious correlations, HALO
leverages vision-language model (VLM) priors to steer retrieval toward task-relevant
information. Concretely, it generates task-relevant, memory-dependent question–answer pairs
from demonstration trajectories and trains the policy jointly with a video
question-answering objective, transferring VLM priors to the visuomotor policy. To reduce
the impact of accumulated errors in memory during closed-loop control, HALO uses sparse
attention that restricts retrieval to only the most relevant parts of the history. Together,
these components enable more reliable long-horizon control by guiding the policy to retrieve
task-relevant information from up to eight minutes of past experience.
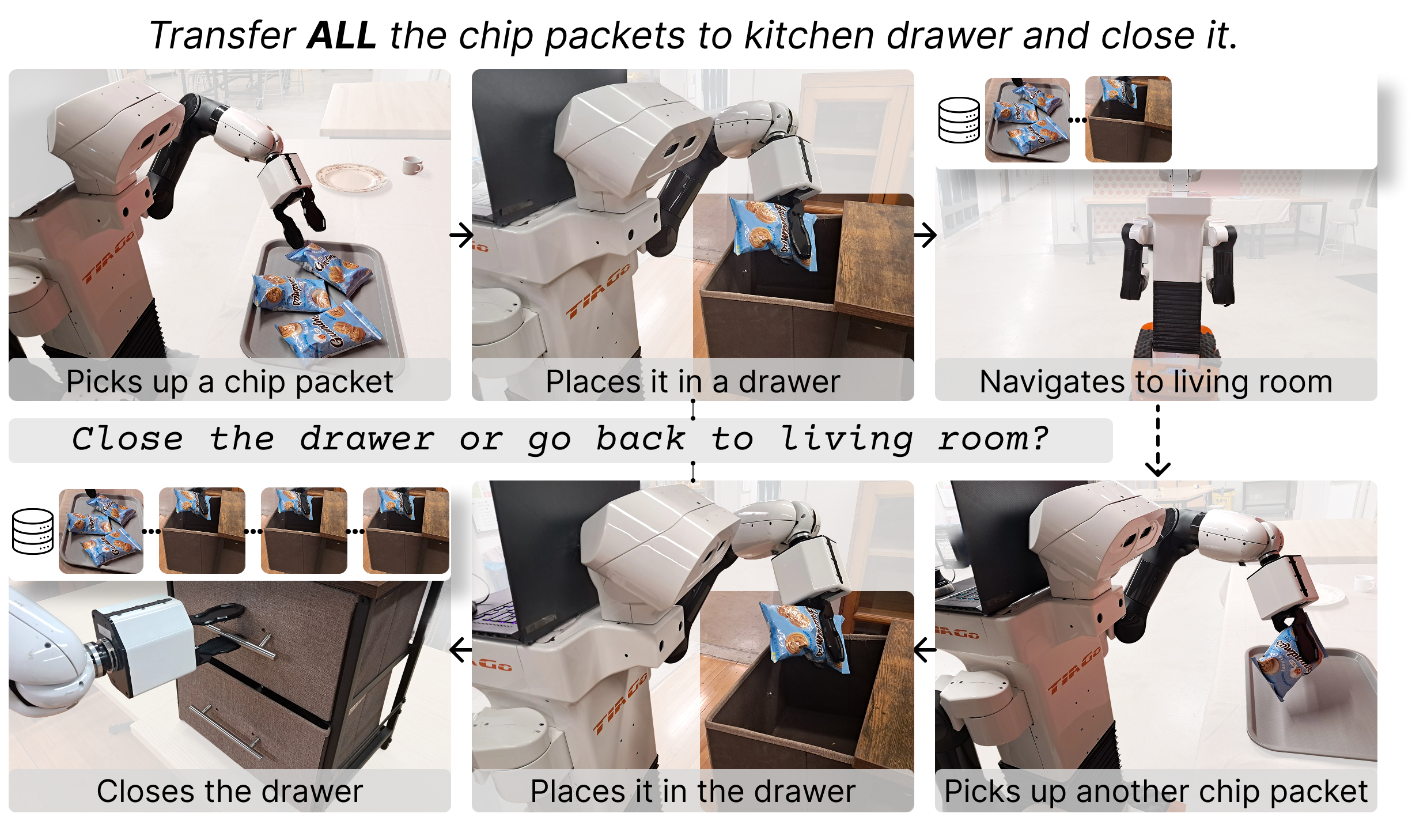
Problem Overview
Long-horizon manipulation requires reasoning over context that is no longer visible: where an object
was placed, how many items were stored, or when a stove was activated. We study tasks spanning up to
eight minutes, where the policy must retrieve from its history of past observations and actions to correctly make decisions.
Below, we provide a motivating example of such long-horizon tasks in mobile manipulation.
Method
HALO is a visuomotor policy with an attention-based memory retrieval mechanism for long-horizon control.
Two challenges arise when applying long-context transformers to imitation learning: policies may learn
spurious correlations from irrelevant history, and prediction errors accumulate over time during
closed-loop execution. HALO addresses both with the two components below.
Distilling Vision-Language Model Priors via Video Question-Answering
HALO generates task-relevant question–answer pairs from demonstration trajectories using a VLM pipeline.
The policy is then co-trained with a video QA objective alongside the imitation learning objective.
This induces priors over retrieving task-relevant information from history, reducing spurious correlations during closed-loop control.
VQA Generation
Input
trajectory, task instruction
↓
Summarize
object detector + VLM
↓
Output
text description of scene & activities
↓
Generate
sample a frame number, LLM generates Q&A
↓
Output
Q: "Where was the granola bar at t=8?" A: "Right side of the countertop"
↓
Filter
score relevance + correctness
↓
Output
curated Q&A dataset
Joint Training
for each step:
# imitation: predict expert action
L_IL = -log P(expert action |
trajectory, task)
# VQA: answer from history
L_VQA = -log P(answer |
trajectory, question)
# joint update
L = L_IL + λ · L_VQA
# update policy to minimize L
Reducing Model Drift with Top-K Attention Sparsification
During inference, the policy attends over all past observations and actions in its history context.
This full-context attention introduces noise from accumulated errors in the history.
To reduce the impact of this noise, we sparsify the attention to retrieve only the most informative pieces of information from history.
A straight-through estimator keeps the discrete selection differentiable during training.
Training
for i in 0..t-1:
score[i] = dot(query, key[i])
# hard top-k mask
top_idx = argsort(score)[-k:]
mask = zeros(t); mask[top_idx] = 1
# straight-through estimator:
# forward uses hard mask,
# backward grad flows through score
mask_st = mask.detach() + score
- score.detach()
context = softmax(mask_st) @ val
Evaluation
for i in 0..t-1:
score[i] = dot(query, key[i])
# hard Top-K (no gradient needed)
top_idx = argsort(score)[-k:]
attn = softmax(score[top_idx])
context = attn @ val[top_idx]
HALO overview. VLM-generated question–answer pairs supervise attention toward task-relevant history frames (L).
Top-K sparse attention restricts retrieval to the most relevant context, reducing error propagation during closed-loop control (R).
Results
Real-World Experiments
Robot rollouts on a physical robot across five tasks (20 rollouts per task). HALO improves on every task, reaching 55% average success versus 36% for the Standard Transformer baseline.
Relational Info.Return to Same Container
Goal: Return the bowl to the same plate it was placed on top of earlier.
HALO returns the bowl to the original plate
HALO returns the bowl to the original plate
HALO returns the bowl to the original plate
HALO returns the bowl to the original plate after recovering from a failed grasp
Numerical Info.Store N Objects
Goal: Place exactly N chip packets in the drawer, then close the drawer.
HALO stores exactly 2 packets and closes the door
HALO stores exactly 2 packets and closes the door
HALO stores exactly 2 packets and closes the door
Event-Time Info.Heat Stove for T Minutes
Goal: Turn off the stove after the specified duration has elapsed.
HALO turns off the stove after 30 seconds
HALO turns off the stove after 30 seconds
HALO turns off the stove after 1 minute
HALO turns off the stove after 1 minute
HALO turns off the stove after 90 seconds
HALO turns off the stove after 6 minutes
HALO turns off the stove after 8 minutes
Numerical Info. + Human-Robot Collab.Store N Objects
Goal: Place 3 purple cups and 1 green cup into the bag. The human places k purple cups first; the robot must complete the rest.
Human places 1 cup; HALO places the remaining 2
Human places 1 cup; HALO places the remaining 2
Human places 1 cup; HALO places the remaining 2
Human places 1 cup; HALO places the remaining 2
Human places 2 cups; HALO places the remaining 1
Human places 2 cups; HALO places the remaining 1
Human places 2 cups; HALO places the remaining 1
Spatial Info.Retrieve Object
Goal: Fetch the object from where it was last seen, now out of view.
HALO retrieves the granola bar from its last seen location
HALO retrieves the granola bar from its last seen location
HALO retrieves the granola bar from its last seen location
HALO retrieves the granola bar from its last seen location
Simulation Benchmark
Average task success rate across four simulation tasks (50 rollouts each).
HALO achieves 41% average success, outperforming all baselines.
Retrieve Object: oil bottle retrieved from its last seen location
Return to Same Container: bowl returned to the original plate
Store N Objects: bread items stored and microwave door closed
Heat Stove: stove turned off after the specified duration
Key Takeaways
Text summaries lose granular detail. ReMemBer (−23 pts) stores VLM text descriptions of observations, but these discard fine-grained details such as precise event timing and low-level action information to retrace the path where the object was found, which may be critical for low-level control.
Learning retrieval beats engineering it. Hand-Designed Features achieves competitive spatial performance, showing that spatial cues are well-captured even without learning, yet HALO matches this without any manually designed rules. Surprisingly, HALO outperforms hand-designed features overall, as the policy can exploit additional information missed by human designers, such as neighboring visual frames that provide implicit cues about the environment.
Selective retrieval outperforms compression. Token Merging and Scene Memory Transformer compress history, discarding fine-grained detail. HALO retains the full context and retrieves selectively, providing flexibility to recollect any information but reducing the impact of noise at the same time.
No single method wins every task; HALO wins overall. Each baseline excels in its specialty (Hand-Designed on spatial, SAM2Act++ on counting) but fails elsewhere. HALO's 41% average comes from competitive performance across all four memory types.
Failure Cases
We categorize failures into two categories: manipulation and memory failure. We find that
HALO reduces manipulation failures by an absolute 8% and memory failures by 25% over the
Standard Transformer baseline in the Retrieve Object task. Below we show the failure modes of HALO. We hope it inspires future work.
Manipulation FailuresGrasp / Motion Error
Grasp failure on the stove knob: robot misses the target
Robot contacts the knob but slips during the twist
Grasp failure on the bowl due to incorrect grasp pose
Robot fails to grasp the bowl
Robot fails to grasp the bowl
Cup falls during grasping
Memory Retrieval FailuresIncorrect Retrieval
Robot retrieves the wrong plate due to not recalling where the bowl was originally placed
Memory error causes subtask misidentification; subsequent placement also fails
Robot miscounts the human contribution and places too many objects
Citation
If you find this work useful, please cite:
BibTeX
@inproceedings{shah2026halo,
title={Memory Retrieval in Visuomotor Policies for Long-Horizon Robot Control},
author={Shah, Rutav and Li, Yisu and Bello, Femi and Zhu, Yuke and Mart{\'{i}}n-Mart{\'{i}}n, Roberto},
booktitle={Proceedings of Robotics: Science and Systems},
year={2026}
}